So far, most drones we’ve seen follow the same design principles as traditional aircraft like planes and helicopters. They have wings with landing gears or rotors with sledges. Some get launched from catapults. The lightest ones from the palm of your hand. A team of engineers from the École Polytechnique Fédérale de Lausanne (EPFL) has discarded these design principles to solve one of the biggest challenges for aerial vehicles: how to take off and land safely without needing runways or additional equipment. Their answer is to equip drones with robotic limbs that mimic bird legs. The result, as detailed in a study published in Nature, is both comically cute and remarkably efficient—potentially revolutionizing drone design in the future.
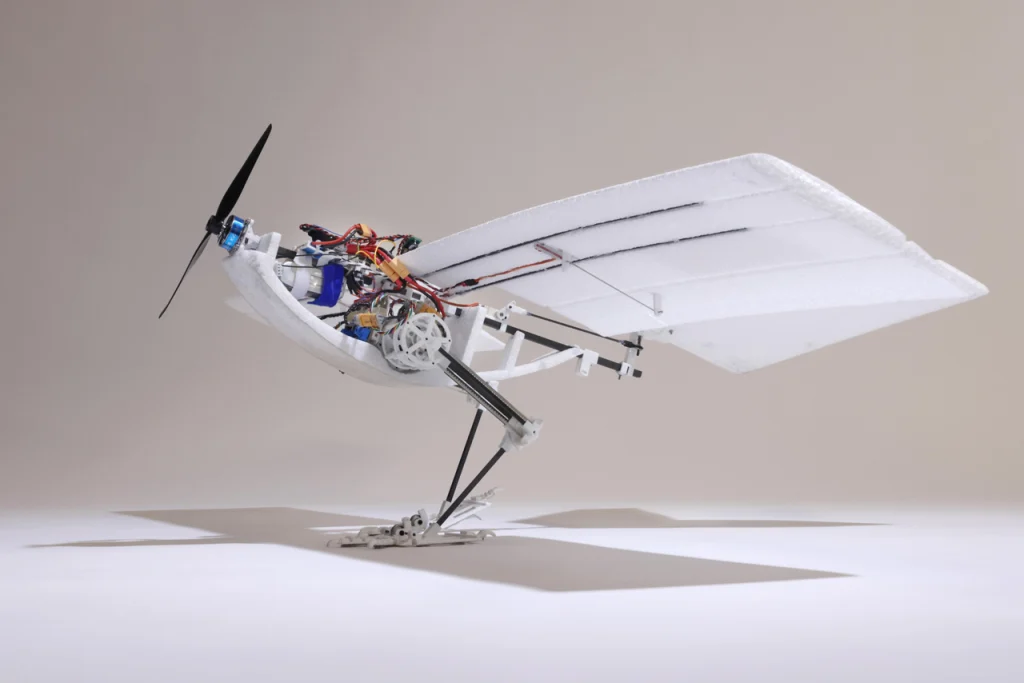
RAVEN—short for ‘Robotic Avian-inspired Vehicle for multiple ENvironments’—is a drone outfitted with bird-inspired robotic legs. These legs allow the drone to perform takeoffs up to 10 times more efficiently than methods like catapults or runway acceleration. Like bird legs, they enable operation on uneven or obstacle-filled terrain.
With these legs, the drone can walk, jump, and overcome obstacles on the ground while also executing safer and more efficient takeoffs and landings. Won Dong Shin, a PhD student at EPFL’s Laboratory of Intelligent Systems and the drone’s creator, explains that his inspiration came while walking through the university campus. He observed crows using their legs to walk, jump over obstacles, and take off. He noticed that they always jumped to initiate flight, even in situations where they could have relied solely on their wings.
This observation led him to hypothesize a biomechanical reason for the behavior. Natural evolution prioritizes energy efficiency, so this behavior likely translates to greater effectiveness in takeoff mechanics.
Using this principle, Shin’s team replicated the same architecture in their robotic crow. The drone features bipedal legs equipped with hip, ankle, and elastic foot joints that store and release energy similarly to bird tendons. These legs provide stability for walking and can traverse gaps of 5 inches and climb over obstacles up to 10 inches tall.
Unlike other drones that rely on catapults or runways for takeoff, RAVEN uses its legs for quick and efficient transitions from ground to air, achieving an initial speed of 7.2 ft/s in just 0.17 seconds. For comparison, a typical commercial airplane reaches approximately 180 mph (264 ft/s) in 30 seconds, with an average acceleration of about 8.8 ft/s². In contrast, RAVEN achieves an acceleration of around 42.5 ft/s².
When compared to conventional drones, RAVEN’s unique takeoff mechanism makes it faster and more energy-efficient because it only requires a short burst to accelerate to flying speed. Won admits that making direct comparisons is challenging because this will depend on the design of the drones, but he says that rotary-wing drones rely solely on propellers for both take-off and flight, which tends to be less energy-efficient. “The need to continuously generate lift might lead to higher energy consumption and shorter operable times,” he points out. In contrast, RAVEN can operate on the ground using its legs, which could be more energy-efficient than maintaining lift with multiple motors and propellers. “Additionally, rotary-wing drones might be more vulnerable to damage—a single bump could potentially render them inoperable. In comparison, RAVEN might offer better resilience in such situations,” he says. [Raven is just a prototype, so it hasn’t been tested for carrying cargo.]
While jumping takeoff requires slightly more energy input, it is the most efficient and rapid method to convert energy into kinetic and potential movement, Shin notes in his study. Tests demonstrated that jumping takeoff is not only more efficient but also more stable than other methods.
How it works
Each leg is equipped with electromagnetic joints, torsional springs, and coil springs located in the ankles and toes. These lightweight, flexible components act as shock absorbers and motion enhancers, storing energy while it walks—like loading a spring—and releasing it when it needs to move.
Additionally, their flexible toes allow the drone to adapt to various terrains, ensuring stability while grounded. Shin emphasizes the importance of incorporating a passive elastic joint in the toes. It’s crucial to enable multiple motion patterns and ensure the drone can jump at the correct angle for takeoff, he says.
Despite its mechanical complexity, the drone weighs just 1.37 pounds, with 8 ounces dedicated to the legs and their mechanisms. This lightweight design is critical for enabling both terrestrial and aerial mobility.
A radical shift in drone design?
Looking ahead, the research team plans to add more capabilities to the legs, such as impact absorption for increased landing precision. The final stage of this biomimetic design will involve integrating AI-driven perception systems for autonomous landings.
The study also highlights that these robotic legs are not limited to small machines. The engineers suggest they can be scaled for larger drones capable of carrying payloads. Shin believes this is feasible but notes that some components will need to be redesigned to maintain efficiency with heavier drones.
I for one welcome a world in which our flying robotic overlords look like impossibly cute fantastic creatures from a Hayao Miyazaki movie.